Teoria
Sterowania
Obserwator
Luenbergera pełnego rzędu
Laboratorium
problemowe, IV rok AGH
|
1. Wprowadzenie Dany jest obserwowalny system liniowy n-tego
rzędu
z m-wymiarowym równaniem wyjścia
Celem ćwiczenia jest skonstruowanie systemu zwanego
obserwatorem Luenbergera pełnego rzędu, który na
podstawie znanej trajektorii wyjścia y
i sterowania u systemu (1),(2)
generuje trajektorię w z upływem
czasu zmierzającej do nieznanej
trajektorii stanu x systemu (1),(2). Obserwator ten ma postać systemu liniowego n-tego
rzędu
przy czym błąd
obserwacji stanu zanika z czasem
przy dowolnych
warunkach początkowych x(0), w(0) i dowolnym sterowaniu u. Po przekształceniach
można pokazać, że konstrukcja obserwatora polega na dobraniu macierzy G w
taki sposób, żeby macierz F była asymptotycznie stabilna
2. Zadanie I Dany jest system oscylacyjny postaci (1),(2) z macierzami
Konstruując
obserwator na początku należy wyrazić elementy macierzy G poprzez wartości
własne λ1, λ2 macierzy F
G jest 2-elementowym
wektorem pionowym Po podstawieniu do
(3) otrzymujemy
Następnie
rozwiązując lewą stronę i przekształcając prawą do postaci wielomianu
charakterystycznego otrzymujemy
Porównując
współczynniki przy s oraz wyrazy wolne dostajemy
Ostatecznie
W ćwiczeniu
przyjęto, że wartości własne są sprzężone tzn. λ1 = λ2
= λ. Modelowanie układu
bez zakłóceń Obserwator
zamodelowano przy użyciu pakietu Matlab-Simulink
Do zamodelowania
systemu i obserwatora wykorzystano standardowe bloczki pakietu Symulink. Aby mieć możliwość obserwacji błędu e=estymata-x należało wyprowadzić zmienną x (stan
systemu). W tym celu system podzielono na dwa bloczki: - pierwszy State-space zawierający równanie stanu systemu z
macierzami
- drugi Matrix-gain
zawierający macierz wyjścia systemu C= [0 1]. Do zamodelowania
obserwatora skorzystano z bloczka State-space z
macierzami
Ponieważ bloczek State-space
posiada jedno wejście skorzystano z multipleksera Mux. Do przestrzeni Matlaba wysyłane były zmienne x oraz estymata.
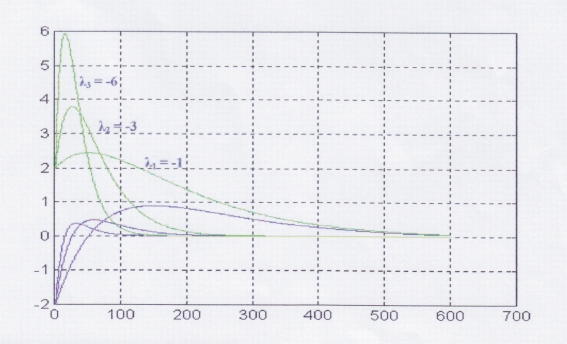
Na wejście układu podawany był skok jednostkowy za pomocą bloczka Step Fcn. Doświadczenie
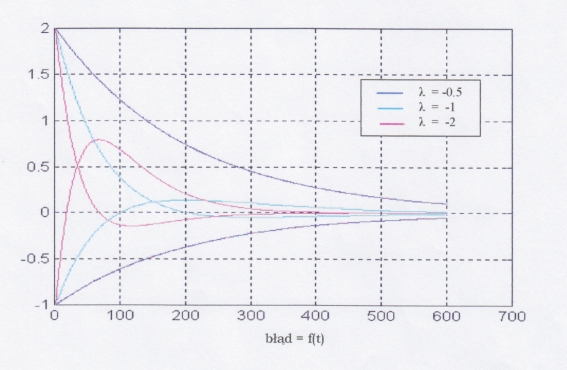
przeprowadzono dla różnych wartości λ. Obserwator startował z innych
warunków początkowych niż system. Wykres poniżej przedstawia błędy
obserwacji. Z wykresu widać, że
obserwator jest szybszy (błąd szybciej zmierza do zera) dla bardziej ujemnych
wartości własnych λ.
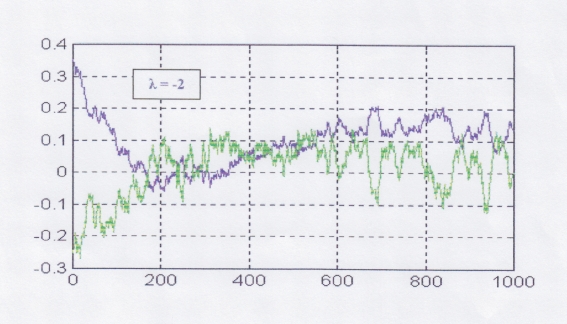
Modelowanie układu z
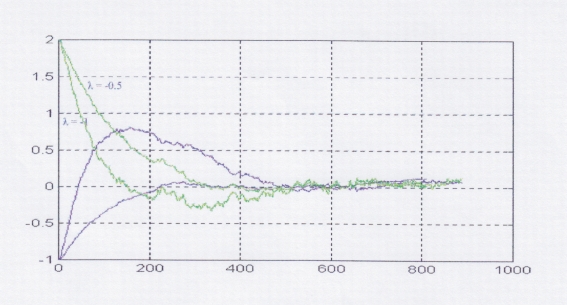
zakłóceniami W celu sprawdzenia
odporności obserwatora na zakłócenia zmodyfikowano poprzedni układ
wprowadzając szum, który dodaje się do sygnału wyjściowego.
Model systemu z
obserwatorem zrealizowany przy pomocy pakietu Matlab-Simulink.
Z wykresu widać, że
pomimo zakłóceń obserwator odtwarza stan i błąd dąży do zera. Jednak jeśli
wartości własne macierzy F są bardziej ujemne, wtedy rośnie wrażliwość na
zakłócenia. Poniżej znajduje się przypadek, gdy obserwator stracił swoje
właściwości – błąd nie zmierza do zera.
3. Zadanie II Dany jest system
Który po sprowadzeniu do równań stanu (1),(2) daje się opisać
następującymi macierzami
System ten jest
obserwowalny. Podobnie jak w poprzednim zadaniu konstruujemy obserwator
poprzez wyrażenie elementów macierzy G za pomocą wartości własnych λ1,
λ2 macierzy F
G jest 2-elementowym
wektorem pionowym Po podstawieniu do
(3) otrzymujemy
Następnie
rozwiązując lewą stronę i przekształcając prawą do postaci wielomianu
charakterystycznego otrzymujemy
Porównując
współczynniki przy s oraz wyrazy wolne dostajemy
W ćwiczeniu
przyjęto, że wartości własne są sprzężone tzn. λ1 = λ2
= λ. Modelowanie układu
bez zakłóceń System z
obserwatorem zrealizowano przy użyciu modelu z zadania poprzedniego
zmieniając odpowiednio macierze A,B,C,G. Wykres
poniżej ilustruje wyniki, z których widać, że obserwator jest szybszy (błąd
szybciej zmierza do zera) gdy wartości własne macierzy F są bardziej ujemne.
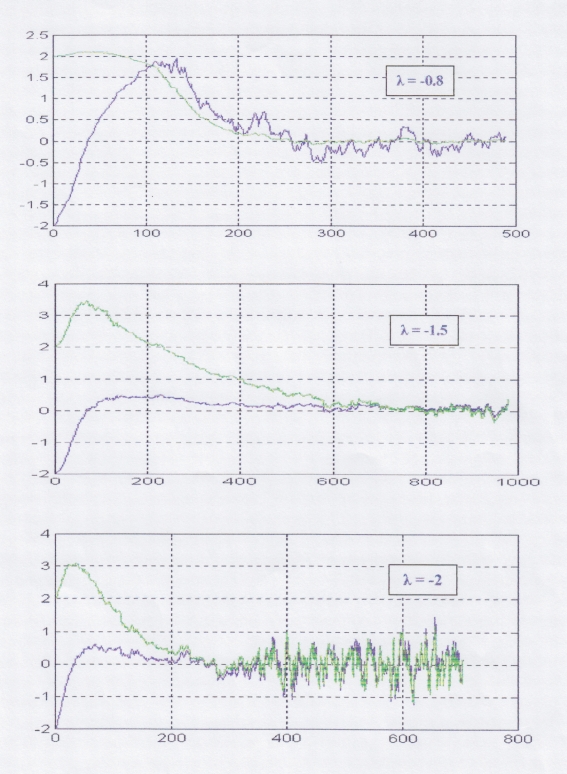
Modelowanie układu z
zakłóceniami W celu zbadania
odporności obserwatora na zakłócenia, do układu wprowadzono szum tak jak dla
zadania I.
Wyniki dają te same
wnioski co dla systemu oscylacyjnego z zdania I. Obserwator dobrze odtwarza
stan systemu, lecz gdy wartości własne macierzy F maleją znacznie, obserwator
traci swe zdolności (ostatni wykres). Zadając wartości własne macierzy F
należy wybrać pewne optymalne wartości, dla których obserwator działa
prawidłowo.
|
|
|